 案例詳情
案例詳情

 19872700032
19872700032
19872700032
19872700032
 新聞資訊3d建模3d點云掃描
新聞資訊3d建模3d點云掃描 官方公告
官方公告 行業(yè)資訊
行業(yè)資訊 技術(shù)分享3d高斯?jié)姙R鄉(xiāng)鎮(zhèn)傾斜攝影電站傾斜攝影三維數(shù)據(jù)采集城市傾斜攝影交通傾斜攝影工廠傾斜攝影校園傾斜攝影景區(qū)3d點云掃描園區(qū)3d點云掃描園區(qū)傾斜攝影裝飾品效果圖企業(yè)/展品3D視頻問題列表三維場景建模
技術(shù)分享3d高斯?jié)姙R鄉(xiāng)鎮(zhèn)傾斜攝影電站傾斜攝影三維數(shù)據(jù)采集城市傾斜攝影交通傾斜攝影工廠傾斜攝影校園傾斜攝影景區(qū)3d點云掃描園區(qū)3d點云掃描園區(qū)傾斜攝影裝飾品效果圖企業(yè)/展品3D視頻問題列表三維場景建模 產(chǎn)品3d點云掃描家具建模設(shè)備建模建筑建模產(chǎn)品建模展館建模爆炸效果圖剖面效果圖裝修效果圖建筑效果圖鳥瞰效果圖
產(chǎn)品3d點云掃描家具建模設(shè)備建模建筑建模產(chǎn)品建模展館建模爆炸效果圖剖面效果圖裝修效果圖建筑效果圖鳥瞰效果圖 VR校園全景3D可視化建模園區(qū)建筑建模工業(yè)設(shè)備建模工業(yè)設(shè)備建模電站能源建模工廠車間建模電商三維建模天貓?zhí)詫毥?/a>京東AR建模產(chǎn)品3D建模文物3d點云掃描傾斜攝影建模VR線上展會汽車3D展館VR藝術(shù)展館VR黨建展廳VR博物館精品案例3D可視化建模園區(qū)建筑建模工業(yè)設(shè)備建模變電站3D建模工廠可視化建模電商三維建模阿里躺平建模京東AR建模產(chǎn)品3d建模文物掃描建模傾斜攝影3D可視化建模電站3d點云掃描工廠3d點云掃描360環(huán)物拍攝全景VR拍攝3D效果圖制作交通運輸建模家具效果圖產(chǎn)品效果圖工廠效果圖醫(yī)療健康建模醫(yī)療設(shè)備建模醫(yī)療場景建模工業(yè)園區(qū)辦公園區(qū)商業(yè)園區(qū)住宅園區(qū)教育園區(qū)物流園區(qū)制造業(yè)3D建模重工業(yè)3D建模輕工業(yè)3D建模環(huán)保業(yè)3D建模
VR校園全景3D可視化建模園區(qū)建筑建模工業(yè)設(shè)備建模工業(yè)設(shè)備建模電站能源建模工廠車間建模電商三維建模天貓?zhí)詫毥?/a>京東AR建模產(chǎn)品3D建模文物3d點云掃描傾斜攝影建模VR線上展會汽車3D展館VR藝術(shù)展館VR黨建展廳VR博物館精品案例3D可視化建模園區(qū)建筑建模工業(yè)設(shè)備建模變電站3D建模工廠可視化建模電商三維建模阿里躺平建模京東AR建模產(chǎn)品3d建模文物掃描建模傾斜攝影3D可視化建模電站3d點云掃描工廠3d點云掃描360環(huán)物拍攝全景VR拍攝3D效果圖制作交通運輸建模家具效果圖產(chǎn)品效果圖工廠效果圖醫(yī)療健康建模醫(yī)療設(shè)備建模醫(yī)療場景建模工業(yè)園區(qū)辦公園區(qū)商業(yè)園區(qū)住宅園區(qū)教育園區(qū)物流園區(qū)制造業(yè)3D建模重工業(yè)3D建模輕工業(yè)3D建模環(huán)保業(yè)3D建模在當(dāng)今科技飛速發(fā)展的時代,無人機的應(yīng)用領(lǐng)域不斷拓展,從軍事偵察到民用的物流配送、環(huán)境監(jiān)測等。然而,當(dāng)無人機以集群的形式出現(xiàn)時,在復(fù)雜環(huán)境中的尋路問題成為了一個巨大的挑戰(zhàn)。而3D建模可視化技術(shù)的出現(xiàn),猶如一盞明燈,為解決這一難題提供了有效的途徑。
無人機集群在復(fù)雜環(huán)境中面臨諸多尋路障礙。復(fù)雜的地形,例如山區(qū)、森林或者高樓林立的城市地區(qū),存在著大量的障礙物。傳統(tǒng)的二維地圖難以精確地呈現(xiàn)出這些障礙物的立體結(jié)構(gòu)和高度信息,這使得無人機在飛行過程中很容易發(fā)生碰撞危險。此外,多變的氣象條件、電磁干擾等因素也會影響無人機的飛行路徑規(guī)劃。
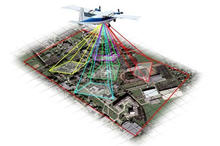
3D建模可視化技術(shù)首先為無人機集群提供了精確的環(huán)境模型。通過對復(fù)雜環(huán)境進行3D建模,每一個山丘、每一棟建筑物都能以三維的形式準確呈現(xiàn)。這種精確性讓無人機能夠提前知曉環(huán)境中的各種障礙物的具體位置和形狀。就像是給無人機配備了一雙慧眼,使它們在飛行前就對即將面臨的復(fù)雜路況有清晰的認識。
在尋路規(guī)劃方面,3D建模可視化實現(xiàn)了多維度的路徑優(yōu)化。與二維尋路算法不同,3D環(huán)境下的尋路可以綜合考慮高度、坡度等因素。例如,在山區(qū)環(huán)境中,無人機可以根據(jù)3D模型規(guī)劃出一條繞過高聳山峰而不是直接飛越的更安全、更節(jié)能的路徑。同時,可視化的3D模型能夠?qū)崟r地根據(jù)環(huán)境變化進行更新。當(dāng)氣象條件改變或者出現(xiàn)新的臨時障礙物時,無人機集群可以迅速重新規(guī)劃路徑,避免危險。
從調(diào)度的角度來看,3D建模可視化技術(shù)增強了對無人機集群的整體把控能力。操作人員可以通過可視化界面直觀地看到每一架無人機的位置、飛行方向以及與周圍環(huán)境的關(guān)系。這有助于實現(xiàn)更合理的任務(wù)分配,例如讓不同性能的無人機執(zhí)行不同難度的任務(wù)。對于緊急情況的處理也更加高效,一旦發(fā)現(xiàn)某架無人機即將遭遇危險,操作人員可以迅速下達指令調(diào)整其飛行路徑。
在安全性方面,3D建模可視化技術(shù)極大地提高了無人機集群的飛行安全系數(shù)。通過提前模擬飛行路徑,能夠發(fā)現(xiàn)潛在的碰撞風(fēng)險并及時規(guī)避。而且,這種可視化的監(jiān)控可以讓安全監(jiān)管更加嚴格,減少因人為失誤或者技術(shù)故障導(dǎo)致的事故。
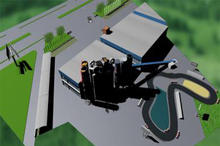
在實際應(yīng)用場景中,比如在城市應(yīng)急救援中,無人機集群需要快速穿越復(fù)雜的城市環(huán)境到達事故現(xiàn)場。3D建模可視化技術(shù)可以確保無人機在高樓大廈之間安全、高效地尋路飛行,及時將救援物資或者收集到的信息傳遞回來。

3D建模可視化技術(shù)為無人機集群在復(fù)雜環(huán)境中的尋路難題提供了全面而有效的解決方案。它不僅提高了無人機集群的作業(yè)效率,還增強了安全性和可靠性,為無人機在更多復(fù)雜環(huán)境下的廣泛應(yīng)用奠定了堅實的基礎(chǔ)。隨著技術(shù)的不斷發(fā)展,相信這一技術(shù)將在無人機領(lǐng)域發(fā)揮越來越重要的作用。