 案例詳情
案例詳情

 19872700032
19872700032
19872700032
19872700032
 新聞資訊3d建模3d點云掃描
新聞資訊3d建模3d點云掃描 官方公告
官方公告 行業資訊
行業資訊 技術分享3d高斯潑濺鄉鎮傾斜攝影電站傾斜攝影三維數據采集城市傾斜攝影交通傾斜攝影工廠傾斜攝影校園傾斜攝影景區3d點云掃描園區3d點云掃描園區傾斜攝影裝飾品效果圖企業/展品3D視頻問題列表三維場景建模
技術分享3d高斯潑濺鄉鎮傾斜攝影電站傾斜攝影三維數據采集城市傾斜攝影交通傾斜攝影工廠傾斜攝影校園傾斜攝影景區3d點云掃描園區3d點云掃描園區傾斜攝影裝飾品效果圖企業/展品3D視頻問題列表三維場景建模 產品3d點云掃描家具建模設備建模建筑建模產品建模展館建模爆炸效果圖剖面效果圖裝修效果圖建筑效果圖鳥瞰效果圖
產品3d點云掃描家具建模設備建模建筑建模產品建模展館建模爆炸效果圖剖面效果圖裝修效果圖建筑效果圖鳥瞰效果圖 VR校園全景3D可視化建模園區建筑建模工業設備建模工業設備建模電站能源建模工廠車間建模電商三維建模天貓淘寶建模京東AR建模產品3D建模文物3d點云掃描傾斜攝影建模VR線上展會汽車3D展館VR藝術展館VR黨建展廳VR博物館精品案例3D可視化建模園區建筑建模工業設備建模變電站3D建模工廠可視化建模電商三維建模阿里躺平建模京東AR建模產品3d建模文物掃描建模傾斜攝影3D可視化建模電站3d點云掃描工廠3d點云掃描360環物拍攝全景VR拍攝3D效果圖制作交通運輸建模家具效果圖產品效果圖工廠效果圖醫療健康建模醫療設備建模醫療場景建模工業園區辦公園區商業園區住宅園區教育園區物流園區制造業3D建模重工業3D建模輕工業3D建模環保業3D建模
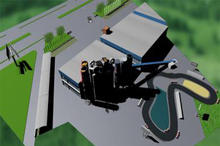
VR校園全景3D可視化建模園區建筑建模工業設備建模工業設備建模電站能源建模工廠車間建模電商三維建模天貓淘寶建模京東AR建模產品3D建模文物3d點云掃描傾斜攝影建模VR線上展會汽車3D展館VR藝術展館VR黨建展廳VR博物館精品案例3D可視化建模園區建筑建模工業設備建模變電站3D建模工廠可視化建模電商三維建模阿里躺平建模京東AR建模產品3d建模文物掃描建模傾斜攝影3D可視化建模電站3d點云掃描工廠3d點云掃描360環物拍攝全景VR拍攝3D效果圖制作交通運輸建模家具效果圖產品效果圖工廠效果圖醫療健康建模醫療設備建模醫療場景建模工業園區辦公園區商業園區住宅園區教育園區物流園區制造業3D建模重工業3D建模輕工業3D建模環保業3D建模在當今數字化時代,停車場的智能化管理已經成為城市發展的重要組成部分。點云掃描建模技術的應用,為停車場的規劃、設計和管理提供了全新的視角和方法。本文將深入探討停車場點云掃描建模的關鍵步驟,以及如何通過這一技術打造智能化停車場。
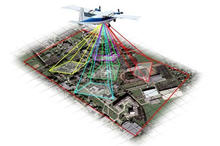
數據采集是停車場點云掃描建模的第一步,也是最關鍵的一步。這一階段需要使用專業的激光掃描設備,對停車場的內部和外部進行全面掃描。在采集數據時,需要注意以下幾點:
確保掃描設備的準確性和穩定性,以獲取高質量的點云數據。
對停車場的各個區域進行全面掃描,包括停車位、通道、出入口等。
注意采集數據的密度和分辨率,以滿足后續建模和分析的需求。
采集到的點云數據需要進行處理,以去除噪聲和異常值,并進行數據配準和拼接。這一階段的關鍵步驟包括:
數據濾波:去除點云中的噪聲和異常值,提高數據質量。
數據配準:將不同視角和位置采集到的數據進行配準,統一坐標系。
數據拼接:將配準后的點云數據拼接成完整的停車場模型。
在數據處理完成后,需要使用專業的三維建模軟件,如Autodesk Revit、SketchUp等,進行停車場的三維建模。這一階段的關鍵步驟包括:
模型構建:根據點云數據構建停車場的三維模型,包括建筑物、停車位、通道等。
細節添加:為模型添加細節,如道路標記、停車位編號、路燈等。
材質貼圖:為模型添加材質和貼圖,使其更加真實。
停車場點云掃描建模的最終目的是為了實現智能化管理。這一階段需要將三維模型與智能化系統集成,實現以下功能:
車位管理:通過點云模型實現車位的實時監測和管理。
車輛導航:利用三維模型為車輛提供精確的導航服務。
安全監控:通過點云模型實現停車場的安全監控和預警。
停車場點云掃描建模是一個動態的過程,需要定期更新和維護。這一階段的關鍵步驟包括:
數據更新:定期對停車場進行掃描,更新點云數據和三維模型。
模型優化:根據實際情況對三維模型進行優化和調整。
系統維護:對智能化系統進行維護和升級,確保其正常運行。

通過以上關鍵步驟,停車場點云掃描建模可以為停車場的規劃、設計和管理提供強有力的支持。這一技術的應用,不僅可以提高停車場的管理效率,還可以為用戶提供更加便捷、安全的停車體驗。隨著技術的不斷進步,停車場點云掃描建模將在未來的城市發展中發揮越來越重要的作用。