 案例詳情
案例詳情

 19872700032
19872700032
19872700032
19872700032
 新聞資訊3d建模3d點云掃描
新聞資訊3d建模3d點云掃描 官方公告
官方公告 行業資訊
行業資訊 技術分享3d高斯潑濺鄉鎮傾斜攝影電站傾斜攝影三維數據采集城市傾斜攝影交通傾斜攝影工廠傾斜攝影校園傾斜攝影景區3d點云掃描園區3d點云掃描園區傾斜攝影裝飾品效果圖企業/展品3D視頻問題列表三維場景建模
技術分享3d高斯潑濺鄉鎮傾斜攝影電站傾斜攝影三維數據采集城市傾斜攝影交通傾斜攝影工廠傾斜攝影校園傾斜攝影景區3d點云掃描園區3d點云掃描園區傾斜攝影裝飾品效果圖企業/展品3D視頻問題列表三維場景建模 產品3d點云掃描家具建模設備建模建筑建模產品建模展館建模爆炸效果圖剖面效果圖裝修效果圖建筑效果圖鳥瞰效果圖
產品3d點云掃描家具建模設備建模建筑建模產品建模展館建模爆炸效果圖剖面效果圖裝修效果圖建筑效果圖鳥瞰效果圖 VR校園全景3D可視化建模園區建筑建模工業設備建模工業設備建模電站能源建模工廠車間建模電商三維建模天貓淘寶建模京東AR建模產品3D建模文物3d點云掃描傾斜攝影建模VR線上展會汽車3D展館VR藝術展館VR黨建展廳VR博物館精品案例3D可視化建模園區建筑建模工業設備建模變電站3D建模工廠可視化建模電商三維建模阿里躺平建模京東AR建模產品3d建模文物掃描建模傾斜攝影3D可視化建模電站3d點云掃描工廠3d點云掃描360環物拍攝全景VR拍攝3D效果圖制作交通運輸建模家具效果圖產品效果圖工廠效果圖醫療健康建模醫療設備建模醫療場景建模工業園區辦公園區商業園區住宅園區教育園區物流園區制造業3D建模重工業3D建模輕工業3D建模環保業3D建模
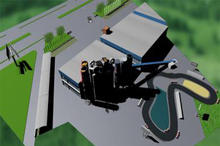
VR校園全景3D可視化建模園區建筑建模工業設備建模工業設備建模電站能源建模工廠車間建模電商三維建模天貓淘寶建模京東AR建模產品3D建模文物3d點云掃描傾斜攝影建模VR線上展會汽車3D展館VR藝術展館VR黨建展廳VR博物館精品案例3D可視化建模園區建筑建模工業設備建模變電站3D建模工廠可視化建模電商三維建模阿里躺平建模京東AR建模產品3d建模文物掃描建模傾斜攝影3D可視化建模電站3d點云掃描工廠3d點云掃描360環物拍攝全景VR拍攝3D效果圖制作交通運輸建模家具效果圖產品效果圖工廠效果圖醫療健康建模醫療設備建模醫療場景建模工業園區辦公園區商業園區住宅園區教育園區物流園區制造業3D建模重工業3D建模輕工業3D建模環保業3D建模傾斜影像是同時從多個角度采集的影像數據,利用傾斜攝影三維建模技術,不僅使高昂的三維建模成本大大降低,而且有效提升了三維建模的速度和效率。 目前,無人機傾斜攝影三維建模為3D智慧城市建設及地形復雜的地質災害監測等提供了 全面、準確、詳細的三維地理信息,無人機傾斜攝影三維建模廣泛應用于多個領域。 然而無人機傾斜影像三維建模實踐中,在影像預處理、空中三角測量、3D模型建立后等各技術 環節,還存在3D建模數據冗余、3D模型變形、影像缺失等多種問題。商迪3D針對這些問題提出了一系列相應的傾斜攝影三維建模技術措施,使無人機傾斜影像三維建模實現了3D模型精細化。

無人機傾斜影像三維建模的關鍵技術包括數據預處理、空中三角測量、多視影像密集匹配、紋理映射等。
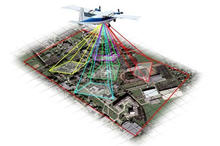
無人機傾斜攝影三維建模中的傾斜影像數據預處理主要為格式轉換、旋轉影像、畸變差改正和增強處理。無人機傾斜攝影三維建模中的空中三角測量是以航空像片上量測的像點坐標為依據,采用嚴密的3D數學模型,按最小二乘法原理,無人機傾斜攝影三維建模采用少量地面控制點為平差條件,快速求解影像的定向及地面點加密問。
傾斜影像的空三解算是將傾斜影像轉換為正射影像的過程,無人機傾斜攝影三維建模包括影像預處理、影像聯合平差、 基于特征點的影像匹配和正射影像的生成等步驟。
通常無人機傾斜攝影三維建模所用的影像匹配方法有基于像方灰度的匹配算法,如相關函數法、協方差函數法、相關系數法、差平方和法、差絕對值法、最小二乘影像匹配法等,還有一種傾斜攝影三維建模影像匹配方法是基于像方特征的匹配算法,如 金字塔多級影像匹配算法、SIFT算法等。
傾斜攝影三維建模SIFT算法在特征點提取的數量上有明顯的優勢,是從一幅圖像中根據設定的閾值找到一個局部特征向量集,,可以很好地進行局部目標的識別與匹配存在較大變 形如旋轉、縮放、尺度改變的影像。

紋理映射是3D建模三維模型制作流程的最后一步,也是增強三維模型視覺效果的關鍵。 通俗地講,紋理映射就是二維到三維的映射關系。三維模型將紋理空間中的紋理像素映射到屏幕空間中的像素的過程,其實質是建立從屏幕空間到紋理空間及紋理空間到景物空間的兩個映射關系。復雜的三維模型具有復雜的表面,需要多幅來自不 同視點的傾斜攝影三維建模影像作為紋理圖,才能為整個三維模型進行紋理映射。
利用無人機傾斜攝影三維建模進行三維模型制作是目前 廣泛采用的3D建模方式,本文通過對無人機傾斜攝影三維建模實踐中經常遇到的技術問題進行分析,提出了一系列的三維模型精細化處理方法,以期對無人機傾斜影像三維建模實踐有一定的參考和借鑒的價值。